
Our Next Generation High Altitude Balloon Payload Platform
The EMDRC (Eastern & Mountain District Radio Club) High Altitude Balloon group has come a long way, worked together as a team to overcome many different challenges, has a few runs on the board and has launches scheduled across 2023 with some ambitious projects in the wings e.g. design, build and launch of our custom payload platform.
 Why Consider A New Platform – So with all of those options why would we even consider a new High Altitude Balloon platform you might ask. I guess the answer you would get is, because we can. So while a custom High Altitude Balloon platform isn’t a necessity, it’s an opportunity for the EMDRC High Altitude Balloon Group to push the boundaries, develop new skills, expand our High Altitude Balloon capabilities and design-build-fly our own custom payload platform that offers enhanced capabilities in a small package.
Why Consider A New Platform – So with all of those options why would we even consider a new High Altitude Balloon platform you might ask. I guess the answer you would get is, because we can. So while a custom High Altitude Balloon platform isn’t a necessity, it’s an opportunity for the EMDRC High Altitude Balloon Group to push the boundaries, develop new skills, expand our High Altitude Balloon capabilities and design-build-fly our own custom payload platform that offers enhanced capabilities in a small package.
The new High Altitude Balloon platform is going to be based on the Raspberry Pi CM4 module which is powered by the BCM2711 Quad-Core Cortex A72 Arm 64Bit SoC with each of the cores clocked at 1.5Ghz. The high level schematic above suggests the different modules the new High Altitude Balloon payload platform might include. The platform is being designed by Trystan CJ and will be tested out by a number of others across the group with significant input provided by Mark VK5QI.
Read Trevor’s VK3TWC complete article LINK
 Inside the world of Australia’s high-altitude balloonists and why they’re not afraid of a missile
Inside the world of Australia’s high-altitude balloonists and why they’re not afraid of a missile

ast Sunday, on a bright and cloudless morning, about 20 people gathered in a park in Ararat, in south-west Victoria, to release a balloon.
The hobbyists, members of the Eastern & Mountain District Radio Club’s High Altitude Balloon group, loaded their aircraft with 400 grams of equipment: a GPS; sensors measuring temperature, pressure and humidity; and a camera that relayed pictures from the air every 30 seconds.
“It’s a fun opportunity for families, kids, adults of all ages to engage with Stem,” says Trevor Warren, who runs the group. Eastern & Mountain District Radio Club – HAB Group.
Filled with helium and made of latex, the balloon travelled 50km north-east and to an altitude of 30km before bursting. Some club members stationed themselves along its flight path.
Link to The Guardian complete article
Have a quick listen to Trevor VK3TWC interview on ABC Melbourne – High altitude ballooning an increasingly popular hobby in Victoria
If all of this talk about High Altitude Ballooning has got you excited and you are keen to be part of the next High-Altitude Balloon launch then please join us on discord (Chat server) at https://discord.gg/4FkrKJeNt5

EMDRC High Altitude Balloon Launch – 14th February 2023
Thank you to everyone who helped make the Feb 2023 High Altitude Balloon launch a massive success. A big thanks to the EMDRC committee including Martin VK3FG, John VK3PZ, Luke VK3UKW, Brad VK3BKQ and Andrew VK3BQ for their ongoing support. A massive thanks to the entire launch team including everyone who helped with tracking and recovery of the payload. It’s humbling to be part of an initiative supported by such a warm bunch of individuals all passionate about STEM and High Altitude Ballooning. Full Report
Trevor VK3TWC
Upcoming Launch : Our upcoming launch is scheduled for the 19th of February at 1000 Hrs (2300 Hrs UTC). The launch site is Centenary Park, Ararat and is an ~2.5 hours drive from Melbourne.

We encourage everyone who is able to help with the tracking to get their gear out, test their setup in advance and help us track the payload post launch. Doesn’t matter how in-expensive your monitoring gear is, every packet counts. See below for details of the relevant frequencies –
- Wenet (SSTV image transmission) frequency : 441.200 Mhz
- HORUS (RS 41) frequency : 434.200 Mhz
You can track the EMDRC HAB Balloon on your browser of choice – LINK
(https://amateur.sondehub.org/#!mt=Mapnik&mz=8&qm=12h&mc=-37.23943,145.08545)
We will provide updates on the launch prep, launch through our #High-Altitude-Balloon channel on discord.
To find out more on HAB Ballooing, software required and how you might go about getting the software installed, to track the balloon. LINK EMDRC – High Altitude Ballooning – Resource Centre
If all of this talk about High Altitude Ballooning has got you excited and you are keen to be part of the next High-Altitude Balloon launch then please join us on discord (Chat server) at https://discord.gg/4FkrKJeNt5
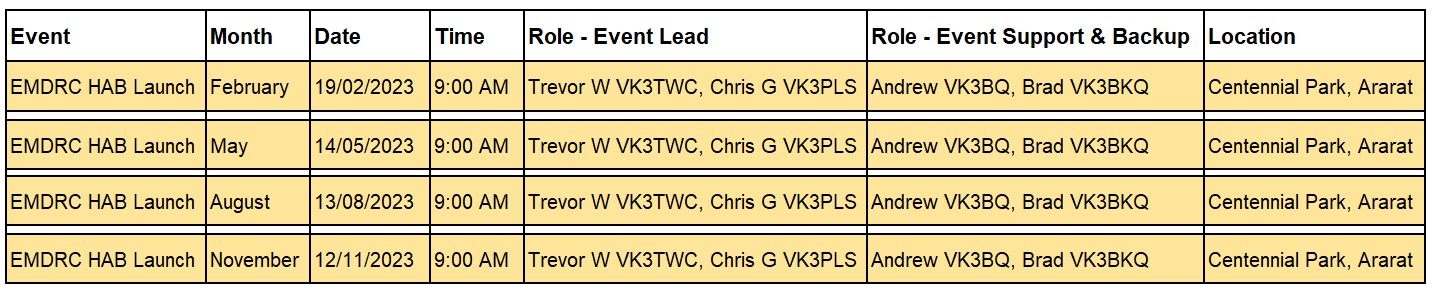
EMDRC HAB proposed Launch Dates 2023

EMDRC High Altitude Balloon Launch – 6th November 2022
On the 4th of November 2022, the EMDRC (Eastern & Mountain District Radio Club – https://www.emdrc.com.au) High Altitude Balloon team got together at Ararat to launch their High Altitude Balloon. Ararat

EMDRC High Altitude Balloon Launch – 4th September 2022
The EMDRC High Altitude Balloon Launch scheduled for the 4th of September 2022 is now complete. This is the High Altitude Balloon Groups first launch and a milestone that we will all remember for years to come. This launch was made possible by the perseverance, dedication and concerted effort from individuals across multiple groups and organizations. Its impossible to name everyone here but a special thanks goes out to the following individuals and organizations who have been instrumental in helping the High Altitude Balloon group to get to this point – Full Report
Trevor VK3TWC
EMDRC HAB
Balloon Launch 4th of September 2022 for 10:00am
The EMDRC team got together on the 31st of August 2022 at 2100 on discord to work through launch preparation activities for the High Altitude Balloon Launch scheduled for the 4th of September 2022, with a backup launch scheduled for the 11th of September (weather, etc.).
The EMDRC (Eastern & Mountain District Radio Club – https://www.emdrc.com.au) High Altitude Balloon (HAB) group has been working towards it’s first launch here in Melbourne. The launch has been almost three years in the making, with COVID being unfortunately responsible for a lot of the delays. The EMDRC HAB group has obtained approval (also called instrument) from CASA (Civil Aviation Safety Authority) including approval from the Ararat council for use of use of crown land for purposes of the launch.
The EMDRC HAB Launch prep session for the 31st of August 2022 was attended by –
- Rohan VK3TRO
- Mark VK3MD
- Mark VK3IRV (Wasn’t able to attend)
- Brad VK3BKQ
- John VK3PZ
- Mark VK5QI
- Trevor VK3TWC
- Rory VK3ASY
- Andrew Buttery
- Chris Gommersall (Soon to be christened VK3PLS)
- Trystan J
The team has shared responsibilities for many of the launch activities. Here’s a view of ownership of the various tasks –
- Rohan VK3TRO – Payload design & build + Part of the launch and recovery team
- Mark VK3IRV – Design & build of Yagi antenna + Raspberry Pi to track Wenet and Sonde payload
- Brad VK3BKQ – Design & build of Yagi antenna + Raspberry Pi to track Wenet and Sonde payload
- Trevor VK3TWC – Strategy, logistics, communications, media, etc. + Part of the launch and recovery team
- Rory VK3ASY – Payload design & build + Part of the launch and recovery team
- Greg Boyles – Design & build of the filling apparatus + Part of the launch and recovery team
- Chris Gommersall (Soon to be christened VK3PLS) – Design & build of the filling apparatus + Part of the launch and recovery team
- Trystan J – Payload design & build + Part of the launch and recovery team
- Andrew B – Part of the launch and recovery team
- Mark VK3MD – Part of the launch and recovery team
- John VK3PZ – Part of the launch and recovery team
- Jack VK3WWW – Part of the launch and recovery team
Key launch variables include –
- Scientific balloon – Hwoyee 500
- Parachute – 36 inch spherachute
- Gas – Pure helium gas
- Payload & radios – Styrofoam box with the following :
- Raspberry Pi Zero with a camera
- Lora board connected to the Pi Zero W for purposes of streaming images (over Wenet)
- 1/4th Ground plane antenna
- Re-flashed Bureau of Meteorology Radiosonde (RS41) with the HORUS binary
- Launch date – 4th of September with 11th of September 2022 as backup
- Launch location – Centenary Park Oval, Ararat
- Launch time – 1000 Hrs AEST with recovery to be performed soon after
- Frequencies in use –
- Wenet (image transmission) frequency : 441.200 Mhz
- HORUS (RS 41) frequency : 434.200 Mhz
- Simplex for comms – 146.525 Mhz
Peparing for a High Altitude Balloon Launch
This post provides a summary of what was discussed –
- The team got together and reviewed the weather forecasts for Sunday the 4th of September including the forecasted wind speeds and the predicted flight path.
- The team confirmed that all the launch variables were looking good and we were a go for launch for the 4th of September 2022 (based on the predictions available as of 2100 Hrs on the 31st of August 2022)
- Final Go/No-Go scheduled for the 3rd of September at 2100 Hrs on discord.
- The team then reviewed the checklists to confirm who was bringing what the launch, Trevor VK3TWC circulated a worksheet with all the items listed down and individuals who have agreed to bring them along for the launch. Link to the checklist
- Mark VK5QI was present at the session and provided insight on some of the launch variables, levers we had at our disposal in case we need to make last minute alterations.
- Trystan confirmed that the additional sensors have now been attached to the payload, will send through pictures on discord so we can all see what the payload now looks like.
- The team worked through the launch site arrival time i.e. 0830 on the 4th of September 2022 with filling of gas scheduled to start at 0900 Hrs.
- Mark VK5QI suggested that we could use the wenet setup to capture the gas filling process and stream those pictures so members know what’s happening at the launch site.
- It was agreed that we would provide updates on discord as we hit milestones during the launch activity.
- Trevor VK3TWC confirmed that CASA approvals were in place, NOTAM’s have been raised, predicted flight path details provided to CASA and Ararat council permission obtained for the morning.
- Cars that will be heading to the launch site, then to the landing site – Trevor VK3TWC, Rory VK3ASY, Rohan VK3TRO
- Brad VK3BKQ intends to setup his Wenet and Sonde monitoring station close to the launch site.
- Car that will be heading to the estimated landing zone – Mark VK3MD, Jack VK3WWW & John VK3PZ
- Mark VK3IRV is intending to find a high enough spot where he can setup his Yagi and track the Wenet and HORUS transmission.
Here’s a list of ToDo activities based on the chat we had yesterday –
- Greg to bring along PVC glue to CoderDojo Altona North and hand over to Trevor VK3TWC (Done)
- Trevor to send out a notification to EMDRC with a summary of what was discussed, launch details, including the frequencies being used for the HORUS and Wenet payload.
- Trevor VK3TWC to work with CASA, submit notification for NOTAM and work with CASA on any corrections required before making the final NOTAM request on the 25th of August 2022. (Work in progress) – Done
- Trevor VK3TWC to perform modelling using the Balloon Burst Calculator and the Parachute Descent calculator and provide the group a view of the outcomes – Done
- Trevor VK3TWC to work with the Ararat Council and obtain the permissions required for the launch – Done
- Trevor VK3TWC to work generate weather forecasts and landing predictions on a daily basis and send out to the group (In Progress).
Here’s a view of the Balloon Burst Estimator –

Here’s a view of the Parachute Descent Estimator –

Here’s the predicted weather and flight paths for the launch morning.


You are all invited to come, be part of the launch on the 4th of September 2022 at 0930 and then help us chase, recover the payload soon after. The launch site is at Ararat and we will be launching at the agreed time, so plan out your day and set out early if you intend to be there for the launch.
Software you need to track the High Altitude Balloon we are launching.
- Project HORUS Chasemapper – Plot your position on a map relative to the balloon using a Raspberry Pi and GPS
- Project Horus horusdemodlib – Plot a reprogrammed radiosonde used as a payload for Amateur High Altitude Balloons
- Project HORUS Horusgui – Windows software to track a reprogrammed radiosonde used as a payload for Amateur High Altitude Balloons
- See images being broadcasted in real-time from the balloon – https://ssdv.habhub.org/
Read more about High Altitude Ballooning and get started with your own High Altitude Balloon journey at EMDRC – High Altitude Ballooning – Resource Centre
EMDRC HAB
Re-scheduled for the 4th of September 2022 for 09:30 Hrs
The EMDRC High Altitude Balloon (HAB) team got together on the 24th of August 2022 to work through launch countdown activities as part of the High Altitude Balloon Launch scheduled for the 28th of August 2022, with a backup launch scheduled for the 4th of September (weather, etc.).
The EMDRC (Eastern & Mountain District Radio Club – https://www.emdrc.com.au) High Altitude Balloon (HAB) group has been working towards it’s first launch here in Melbourne. The launch has been almost three years in the making, with COVID being unfortunately responsible for a lot of the delays. The EMDRC HAB group has obtained approval (also called instrument) from CASA (Civil Aviation Safety Authority) including approval from the Ararat council for use of use of crown land for purposes of the launch.
The Pre-Launch Countdown session on the 24th of August 2022 was attended by –
- Rohan A / VK3TRO
- Mark D / VK3MD
- Mark / VK3IRV
- Brad Q / VK3BKQ
- Trevor W / VK3TWC
- Luke / VK3UKW
- John / VK3PZ
- Chris Gommersall (Soon to be christened VK3PLS)
- Trystan J

This post provides a summary of what was discussed –
- The predicted flight path (for the launch on the 28th at 0930 AEST) based on modelling performed through the week confirmed that it was very likely that the payload would end up in the ocean.
- The predicted wind speeds for the time of the launch were getting to a point where it could jeopardize the safety of the payload including our ability to launch.
- Tweaking of the various levers at our disposal i.e. gas in the balloon, weight of the payload, ascent rate, etc. was not going to reduce the flight risk for the given weather conditions.
- Having parachutes of different sizes could help us change the descent rate (increase it with a smaller parachute) but again this wasn’t going to significantly reduce flight risk for the given weather conditions.
- It was agreed that the upcoming launch would be re-scheduled for the 4th of September 2022 for 0930 Hrs with a backup scheduled for 11th of September 2022.
- It was agreed that the EMDRC High Altitude Ballooning team would catch-up again for a Pre-Launch Countdown meet on the 31st of August 2022 with a final Go/No-Go scheduled for the 3rd of September 2022.
- It was decided that Trevor / VK3TWC would reach out to CASA, request cancellation of the NOTAM request.
- It was agreed that Trevor / VK3TWC would reach out to the Ararat Council requesting a re-schedule of the launch to 4th September at 0930 Hrs AEST.
Key launch variables include –
- Scientific balloon – Hwoyee 500
- Parachute – 36 inch Spherachute
- Gas – Pure helium gas
- Target ascent rate – ~5 m/s
- Target descent rate – ~3 m/s
- Payload & radios – Styrofoam box with the following :
- Raspberry Pi Zero with a camera
- Lora board connected to the Pi Zero W for purposes of streaming images (over Wenet)
- 1/4th Ground plane antenna
- Re-flashed Bureau of Meteorology Radiosonde (RS41) with the HORUS binary
- Previously agreed launch date – 28th of August 2022
- New launch date – 4th of September 2022 with 11th of September 2022 as a backup
- Launch location – Centenary Park Oval, Ararat
- Launch time – 0930 Hrs AEST with recovery to be performed soon after
- Frequencies in use –
- Wenet (image transmission) frequency : 441.200 Mhz
- HORUS (RS 41) frequency : 434.200 Mhz
The predicted flight path for the 28th of August 2022 based on the above launch variables is as follows –

The predicted weather conditions for the 28th of August 2022 is as follows –

The team has shared responsibilities for many of the launch activities. Here’s a view of ownership of the various tasks –
- Rohan A / VK3TRO – Payload design & build + Part of the launch and recovery team
- Mark / VK3IRV – Design & build of Yagi antenna + Raspberry Pi based tracking setup to track Wenet and Sonde payload
- Luke / VK3UKW – Design & build of tracking setup based on the Raspberry Pi
- Brad Q / VK3BKQ – Design & build of Yagi antenna + Raspberry Pi to track Wenet and Sonde payload
- Trevor W / VK3TWC – Strategy, logistics, communications, media, etc. + Part of the launch and recovery team
- Rory / VK3ASY – Payload design & build + Part of the launch and recovery team
- Greg Boyles – Design & build of the filling apparatus + Part of the launch and recovery team
- Chris Gommersall (Soon to be christened VK3PLS) – Design & build of the filling apparatus + Part of the launch and recovery team
- Trystan J – Payload design & build + Part of the launch and recovery team
- Mark / VK2MD – Part of the launch and recovery team
- Jack B / VK3WWW – Part of the launch and recovery team
The EMDRC High Altitude Balloon team welcomes new members. Please write to us if you have any questions or if you are keen to be part of the launch group.
Read more about High Altitude Ballooning and get started with your own High Altitude Balloon journey at https://hack2.live/high-altitude-ballooning/
EMDRC HAB Launch Prep Session

The EMDRC team got together on the 19th of August 2022 to work through launch preparation activities for the High Altitude Balloon Launch scheduled for 9:30 28th of August 2022, with a backup launch scheduled for the 4th of September (weather, etc.).
The EMDRC (Eastern & Mountain District Radio Club – https://www.emdrc.com.au) High Altitude Balloon (HAB) group has been working towards it’s first launch here in Melbourne. The launch has been almost three years in the making, with COVID being unfortunately responsible for a lot of the delays. The EMDRC HAB group has obtained approval (also called instrument) from CASA (Civil Aviation Safety Authority) including approval from the Ararat council for use of use of crown land for purposes of the launch.
The EMDRC HAB group met on the 19th of July 2022 on discord to work through launch preparation activities. The session was attended by –
- Rohan A / VK3TRO
- Mark / VK3IRV
- Brad Q / VK3BKQ
- Trevor W / VK3TWC
- Rory / VK3ASY
- Chris Gommersall (Soon to be christened VK3PLS)
- Trystan J
The team has shared responsibilities for many of the launch activities. Here’s a view of ownership of the various tasks –
- Rohan A / VK3TRO – Payload design & build + Part of the launch and recovery team
- Mark / VK3IRV – Design & build of Yagi antenna + Raspberry Pi to track Wenet and Sonde payload
- Brad Q / VK3BKQ – Design & build of Yagi antenna + Raspberry Pi to track Wenet and Sonde payload
- Trevor W / VK3TWC – Strategy, logistics, communications, media, etc. + Part of the launch and recovery team
- Rory / VK3ASY – Payload design & build + Part of the launch and recovery team
- Greg Boyles – Design & build of the filling apparatus + Part of the launch and recovery team
- Chris Gommersall (Soon to be christened VK3PLS) – Design & build of the filling apparatus + Part of the launch and recovery team
- Trystan J – Payload design & build + Part of the launch and recovery team
- Mark / VK2MD – Part of the launch and recovery team
- Jack B / VK3WWW – Part of the launch and recovery team
Key launch variables include –
-
-
- Scientific balloon – Hwoyee 500
- Parachute – 36 inch spherachute
- Gas – Pure helium gas
- Payload & radios – Styrofoam box with the following :
- Raspberry Pi Zero with a camera
- Lora board connected to the Pi Zero W for purposes of streaming images (over Wenet)
- 1/4th Ground plane antenna
- Re-flashed Bureau of Meteorology Radiosonde (RS41) with the HORUS binary
- Launch date – 28th of August 2022 with 4th of September 2022 as backup
- Launch location – Centenary Park Oval, Ararat
- Launch time – 0930 Hrs AEST with recovery to be performed soon after
- Frequencies in use –
- Wenet (image transmission) frequency : 441.200 Mhz
- HORUS (RS 41) frequency : 434.200 Mhz
-
 Preparing for a High Altitude Balloon Launch
Preparing for a High Altitude Balloon LaunchThis post provides a summary of what was discussed –
- The team will get together on Wednesday the 24th of August 2022 to review where we have landed, go over the checklists for launch including confirming who’s bringing what to the launch.
- The team will get together on Saturday the 27th of August 2022 to review the weather for the launch morning and confirm Go/No-Go for the launch.
- Cars that will be heading to the launch site, then to the landing site – Trevor W / VK3TWC, Rory / VK3ASY, Brad / VK3BKQ
- Car that will be heading to the estimated landing zone – Mark / VK3MD, Jack / VK3WWW
- Mark / VK3IRV will not be part of the launch or recovery party but is intending to find a high enough spot where he can setup his Yagi and track the Wenet and HORUS transmission.
- Greg to bring along gas filling assembly to CoderDojo Altona North and hand over to Trevor / VK3TWC (Done)
- Trevor to send out a notification to EMDRC with a summary of what was discussed, launch details, including the frequencies being used for the HORUS and Wenet payload.
- Trevor / VK3TWC to work with CASA, submit notification for NOTAM and work with CASA on any corrections required before making the final NOTAM request on the 25th of August 2022. (Work in progress)
- Trevor / VK3TWC to perform modelling using the Balloon Burst Calculator and the Parachute Descent calculator and provide the group a view of the outcomes (Done)
- Trevor / VK3TWC to work with the Ararat Council and obtain the permissions required for the launch (Done).
- Trevor / VK3TWC to finalize all the details and send out notification to EMDRC (In Progress).
- Trevor / VK3TWC to work generate weather forecasts and landing predictions on a daily basis and send out to the group (In Progress).
- Trevor / VK3TWC to meetup with Chris G and hand over the filling assembly Greg has put together (Scheduled for 21/08).
- Rohan / VK3TRO is working on finalizing the payload build, will schedule a test on Sunday the 21st of August 2022 and notify the team so that they can test out the equipment in preparation for the launch.
- Rohan / VK3TRO to re-flash a BoM Radiosonde (RS41) with the right frequency and provide details to the group.
- Rohan / VK3TRO to finalize frequency for Wenet and provide details to the group.
Here’s a view of the Balloon Burst Estimator –

Here’s a view of the Parachute Descent Estimator –

You are all invited to come, be part of the launch on the 28th of August 2022 at 0930 and then help us chase, recover the payload soon after. The launch site is at Ararat and we will be launching at the agreed time, so plan out your day and set out early if you intend to be there for the launch.
Software you need to track the High Altitude Balloon we are launching.
- Project HORUS Chasemapper – Plot your position on a map relative to the balloon using a Raspberry Pi and GPS
- Project Horus horusdemodlib – Plot a reprogrammed radiosonde used as a payload for Amateur High Altitude Balloons
- Project HORUS Horusgui – Windows software to track a reprogrammed radiosonde used as a payload for Amateur High Altitude Balloons
- See images being broadcasted in real-time from the balloon – https://ssdv.habhub.org/
Read more about High Altitude Ballooning and get started with your own High Altitude Balloon journey at https://hack2.live/high-altitude-ballooning/
Please write to me at trevor at hack2 dot live or hab at emdrc dot com dot au if you have any questions. I’ll do my best to respond.
EMDRC High Altitude Balloon Initiative : 1 August 2022
Pre-Launch Test
The EMDRC – High Altitude Balloon (HAB) group has been working towards it’s first launch here in Melbourne. The launch has been almost three years in the making, with COVID being unfortunately responsible for a lot of the delays. The EMDRC HAB group has obtained approval (also called instrument) from CASA (Civil Aviation Safety Authority), been in discussions with landowners to secure approval for use of their premises (Country Eastern Victoria) and has been working on putting together their payload for the first launch.
The High Altitude Balloon roadmap can be summarized as follows (timeline is tentative) –
- July 2022 – Pre-Launch Test
- August 2022 – Test Launch (simple payload)
- September 2022 – Pre-Launch Test
- October 2022 – Main Launch (complex payload)
- November / December 2022 – Next generation payload development
- Jan 2023 – Initial testing of next generation payload
- Feb 2023 – Pre-Launch Test with next generation payload
- March 2023 – Main Launch with next generation payload
Please note that the EMDRC HAB roadmap is evolving and the timeline will change based on challenges encoutered and as our priorities evolve (based on learning gained from the challenges we encounter).
The EMDRC High Altitude Balloon team caught up on the 17th of July 2022 to work through the various Pre-Launch test activities. The objectives for this Pre-Launch test included –
- Testing out the filling equipment (balloon) for the initial Test Launch
- Stringing together each of the items part of the launch i.e. balloon, parachute, payload box, re-programmed radiosonde, etc.
- Working through integration of the HAB payload which includes – Styrofoam box and the equipment inside i.e. radio + raspberry pi, antenna, camera, power supply, etc.
- Testing the ground stations, tweaking configuration to suit
- Confirming our understanding of any gaps that might exist
- Confirming readiness for our launch
The EMDRC HAB team who turned up to support the Pre-Launch test included (Apologies if I’ve missed someone out, please bring it to my attention and i’ll be glad to add you to the list)-
- Rohan VK3TRO
- Luke VK3UKW
- Mark VK3IRV
- Brad VK3BKQ
- Mark VK3MD
- Jack VK3WWW
- Chris
- Greg
- Trystan
- Trevor VK3TWC
- John VK3PZ
- John VK3JWC
Luke VK3UKW was kind enough to get there early in the morning on the 17th of July and opened up the EMDRC clubhouse for us. The others made their way soon after. Trevor brought along some sausages, bread while Trystan supplied the onions. John VK3JCW helped setup the barbecue and get things going, which allowed the HAB team to focus on their agreed activities for the day. Here’s some of the pictures we took on the day.





The outcome of the testing can be summarized as follows –
- Procured and tested out the new analog gas flow meter with the existing helium cylinder
- Successfully built and tested out the filling assembly, pipe fittings for the small test balloon
- Confirmed that a larger pipe (40mm OD) was required to connect to the filling assembly when working with the larger balloon
- Inflated the balloon using the filling assembly that was assembled
- Linked each of the different components together i.e. parachute, builders line, reprogrammed radiosonde, secondary payload box with camera, etc.
- Confirmed data from the re-programmed sonde was being received by a ground station
- Identified gaps with the secondary payload, integration work required (LoRA board, raspberry pi, camera module, etc.)
- Confirmed the need to purchase another cylinder just before the test launch
Here’s some lessons we learned from the testing we performed –
- Distance between the balloon and the parachute – 2m
- Distance between parachute and 1st payload (radiosonde) – 2m
- Distance between 1st payload and 2nd payload – 1m
- Need to separate ourselves into 3 teams –
- Payload integration
- Balloon prep
- Ground tracking readiness
- Finalize checklist, run-sheet and have both printed out so that we have paper copies available
- Avoid the need to use electronic devices / tablets during launch prep
- Confirm if Rohan requires TW to drop off the 2nd payload box
Here’s a list of items that needed to be worked through post the Pre-Launch test and before the actual launch.
- Finalize a date for the launch, kick off the launch countdown – HAB Team
- Submit request to Ararat council, request permission for use of the agreed area for launch activity. – Trevor VK3TWC
- Once the above confirmation has been obtained, submit request to CASA for raising the NOTAM – Trevor VK3TWC
- Assemble the payload box, make sure it’s well padded and equipment doesn’t move – Rohan VK3TRO
- Test out Wenet reception (payload) – Rohan VK3TRO
- Build and test out filling apparatus for large balloon (40mm) – Chris
- Send out a notice to the EMDRC mailing list, confirm launch schedule – Trevor VK3TWC
- Prepare write-up for the EMDRC newsletter – Trevor VK3TWC (this one)
- Write up procedure for setting up Wenet tracker, send out to the EMDRC mailing list – Rohan VK3TRO
EMDRC High Altitude Balloon Initiative : 29 July 2022
Gearing Up For Our First Launch
The EMDRC High Altitude Balloon (HAB) group has been working towards it’s first launch here in Melbourne. The launch has been almost three years in the making, with COVID being unfortunately responsible for a lot of the delays. The EMDRC HAB group has obtained approval (also called instrument) from CASA (Civil Aviation Safety Authority), been in discussions with landowners to secure approval for use of their premises (Country Eastern Victoria) and has been working on putting together their payload for the first launch.
The EMDRC HAB group met on the 29th of July 2022 on discord to finalize the dates for the first launch. The session was attended by –
1. Chris
2. Trystan
3. Rohan VK3TRO
4. Mark VK3IRV
5. Brad VK3BKQ
6. Trevor VK3TWC
This post provides a summary of what was discussed –
- Our primary launch day is the 21st of August 2022 with 28th of August 2022 being our backup.
- Trevor VK3TWC will reach out to our contacts within the Ararat council, request permission for the agreed dates.
- We agreed that we’ll be meeting up at Docklands Makerspace on the 7th of August 2022 at 1230 to work on the payload, build the antenna, assemble the electronics.
- Rohan VK3TRO and Trevor VK3TWC to link up over the phone, confirm that all the parts/equipment required to finalize build of the payload were in place before meeting up at Docklands on the 7th of August 2022.
- We used the balloon gas calculator (http://randomsolutions.co.uk/Random_Aerospace/Balloons.html) and confirmed the amount of gas required for the balloon we are planning to use (Hwoyee 500). See image below that shows gas requirements for the balloon being used for the first test launch.
- Chris confirmed that pressure within the gas cylinder was down to 2,000 PSI from 2,200 PSI and given the amount of gas required for the launch we shouldn’t need to invest in another cylinder.
- Mark VK5QI walked us through the design for a simple 1/4 wave ground plane antenna build that we might use for the payload. Design to be translated to build when we meet at Docklands Makerspace on the 7th of August 2022.
- Rohan confirmed that all the payload integration work will be completed over the coming two weekends. Rohan has offered to take the payload (Wenet + Radiosonde) to a spot high above the ground e.g. Mount Dandenong and give the rest of the EMDRC HAB team an opportunity to test out reception from the Wenet payload + Radiosonde.
EMDRC High Altitude Balloon Initiative : 19 June 2022
Workshop
Introduction
The EMDRC High Altitude Balloon Initiative provides an opportunity for individuals of all ages to participate in the design, build, launch and retrieval of a High Altitude Balloon. The EMDRC High Altitude Balloon roadmap for 2022 – 2023 offers multiple launch opportunities with payloads of varying complexities. This document summarizes the approach, equipment required to track the EMDRC High Altitude Balloon payload.
Receiving Data from Re-Programmed RS41 Radiosondes (HAB Payload)
- The EMDRC High Altitude Balloon initiative will be using reprogrammed RS41 radiosondes to send telemetry back to the ground. These RS41 radiosondes have been flashed with the open-source RS41ng firmware and make use of the Horus Binary 4FSK mode written by David Rowe and Mark Jessop (VK5QI).
- The Horus Binary provides a robust telemetry mode designed specifically for high-altitude balloon tracking, and allows for reliable reception at many hundreds of km range with a modest receiver setup.
- If you’d like to be able to decode these signals first, you will need some kind of receiver for whatever frequency the telemetry is being transmitted on. Usually this is within the 434 MHz ISM/LIPD/70cm band, but could be different.
- You need a receiver capable of receiving Single-Sideband, in particular the ‘upper’ sideband (‘USB’ – no, not that USB). This could be a conventional amateur radio transceiver (think IC-7000, IC-706, FT-817, the list goes on and on…), or a scanner (Icom IC-R10, Yupiteru MVT-7100, etc…).
- If you don’t have a UHF SSB receiver lying around another option is use an SDR dongle like the RTL-SDR along with software such as Horus GUI on windows or the “horusdemodlib” if using the RTLSDR with the Raspberry Pi.
1. Horus Gui on Windows : The easiest way to demodate telemetry is using the Horus-GUI software. A detailed guide for setting up the Horus-GUI can be found here – https://github.com/projecthorus/horusdemodlib/wiki/1.1-Horus-GUI-Reception-Guide-(Windows-Linux-OSX)#horus-binary-reception-using-horus-gui
2. There’s other options including running it with a Raspberry Pi headless https://github.com/projecthorus/horusdemodlib/wiki/1.2–Raspberry-Pi-‘Headless’-RX-Guide - If you don’t want to go to the trouble of setting up a Raspberry Pi from scratch the HAB team have created a ready-to-go Raspberry Pi image with all the necessary software setup and configured to decode telemetry.
- All you will need to do is download the image, flash it to an SD card, put it in a Raspberry Pi. Here is a link to download the prepared image – https://hab.rohbot.cc/hab-pi.zip
Receiving Data from BoM RS41 Radiosondes
- If you intend to track and chase RS41 Radiosondes launched twice a day by BoM please you’ll need to setup your RTLSDR and your Raspberry Pi with the following software –
a. Auto_rx – https://github.com/projecthorus/radiosonde_auto_rx/wiki
b. Chasemapper – https://github.com/projecthorus/chasemapper
EMDRC High Altitude Balloon Initiative : June 2022
Roadmap
News : The EMDRC High Altitude Balloon Group have agreed on the roadmap of activities for 2022. We kick off our activities for 2022 with a HAB workshop and barbecue to be held at the EMDRC club. Date/time to be confirmed in the coming days. Please find below a summary of the roadmap for 2022. Specific dates/times will be confirmed 4-5 weeks in advance.
- June 2022 – Workshop and barbecue with EMDRC
- July 2022 – Workshop & Outdoor activity : Run through checklist, confirm equipment and resource preparedness, perform simulated launch
- Aug 2022 – Perform Test launch
- September 2022 – Outdoor activity : Run through checklist, confirm equipment and resource preparedness, perform simulated final launch
- October 2022 – Perform our first complex payload with “Pi in the sky”
- Dec 2022 – Test custom payload I outdoors
- Jan 2023 – Outdoor activity : Run through checklist, confirm equipment and resource preparedness, perform simulated launch with complex payload I
- March 2023 – Perform launch with complex payload I
- May 2023 – Design & build complex payload II (TBD)
- July 2023 – Design & build complex payload III (Video)
 In the lead up to their inaugural launch the HAB team will be running a few workshops for those wishing to set up their own receiver station to decode the Horus Binary Packets that will be used for telemetry. A HAB telemetry payload transmitting Horus Binary format telemetry can provide position updates approximately every 3 seconds. Using just 10mW transmit power on the 70cm band, this modem can offer ~7dB improved demodulation performance compared to RTTY running at the same baud rate. There is some further information on the modem performance available here.
In the lead up to their inaugural launch the HAB team will be running a few workshops for those wishing to set up their own receiver station to decode the Horus Binary Packets that will be used for telemetry. A HAB telemetry payload transmitting Horus Binary format telemetry can provide position updates approximately every 3 seconds. Using just 10mW transmit power on the 70cm band, this modem can offer ~7dB improved demodulation performance compared to RTTY running at the same baud rate. There is some further information on the modem performance available here.
The current Horus Binary modem uses ~1kHz of bandwidth, so can be received using conventional single-sideband receivers, just like you would do with a RTTY payload. Software-Defined Radio receivers (RTL SDR, etc.) can also be used.
Getting some of the software installed and configured can be a bit of a pain. These workshops are being run to help you get familiar with the Raspberry Pi and deploy the relevant tracking tools on it.
Software & Hardware : Here are two applications you’ll need installed on the Raspberry Pi (with the RTL SDR, 1/4th Ground plane antenna) for tracking of the HORUS payload.
If you intend to use Windows to track the HORUS payload please check out the following application
But please keep in mind, you don’t want to have auto_rx (used to track radiosonde’s) and horusdemodlib (used to track HORUS payload) running at the same time. We highly recommend using the docker containers for installation of auto_rx, horusdemodlib, etc. since it makes upgrading software heaps easier.
HAB Fundamentals // Safety 101
- The key to High Altitude Ballooning is to try to be as safe as possible at all times. Like all things there are a number of situations that could cause harm or damage to either you or other people – it is very important to bear this in mind when planning, construction and flying High Altitude Balloon missions.
- Secondly one needs to remember that HAB flights cross a number of ‘fields’ e.g transmitting in radio bands and travelling through airspace. There are other users of these ‘fields’ both professional and amateur – it is important to recognise that they have as much right and often even more right to do what they do – try to avoid interfering.
- We are often asked whether launching balloons is a hazard to both planes in the air and also on landing to property, cars and people. There is certainly a risk however the risk is small and we try our hardest to minimise this risk.
- For example a number of methods we use to reduce this risk:
- We strive to construct as light a payload as possible – this both makes it safer in flight and on landing but also allows us to optimise our flights as we require less helium and can achieve even higher altitudes.
- Payloads are also insulated with polystyrene and this helps to soften the landing.
- We have permission from the CASA to launch payloads attached to meteorological balloons, a NOTAM (Notice to Airmen) is issued and we contact the ATC (Air Traffic Control) just before we launch.
- All payloads fly with a parachute attached, these are usually pre-deployed to reduce the risk of something going wrong and will slow the payloads descent after the balloon has burst.
- Careful planning goes into a balloon launch and we have increasingly sophisticated prediction software (check out CUSF’s landing predictor).
- We only launch when we know its safe, we avoid flight profiles that could land in towns and cities and also the sea – it helps to be able to get the payload back!
Please write to us at hab @ emdrc.com.au with any questions, comments or input you might have.
EMDRC High Altitude Balloon Initiative : May 2022
Horus 57 Imagery Flight : Scheduled for 07/05/2022 [HAB Update]

G’day Team – Hope you’ve been well.
The HORUS imagery flight scheduled for last weekend has now been rescheduled for the 7th of May 2022 at 1000 Hrs.
Spoke with VK5QI/Mark and he suggests that if the team ends up using the 1600g Hwoyee balloon it’s likely that we’ll pick up a signal here in Vic.
See the following link for details – https://www.areg.org.au/archives/210813
Here’s the two applications you’ll need installed on the Raspberry Pi for tracking of the HORUS payload –
If you intend to use Windows to track the HORUS payload please check out the following application –
Receiving the WENET images is a bit more complex. Check out the details here – https://github.com/projecthorus/wenet/wiki/Wenet-RX-Instructions-(Linux-using-Docker) or use the simpler approach and check out the images captured here – https://ssdv.habhub.org/
Unrelated to the weekend launch…..those who want to track and recover radiosondes need to have the following applications installed on their Raspberry Pi –
But please keep in mind, you don’t want to have auto_rx (used to track radiosonde’s) and horusdemodlib (used to track HORUS payload) running at the same time.
We intend to organize a session for interested members to get together and work on building their own tracking setup (using Windows, Pi, etc.).
Please write to me directly and let me know if you have any suggestions on what you would like to see included in the upcoming hands on sessions.
Take care and happy hacking!!!!!
PN: If you do not want to be included on future HAB emails log into ‘Members Login’ and tick ‘High Altitude Balloon’
EMDRC High Altitude Balloon Initiative : Vol 2, April 2022
G’day Team – Hope you’ve been well
A very happy Easter to each of you and your loved ones. May you and your families be showered with good health, peace, happiness, joy and prosperity, this Easter. Here’s extending my best wishes to you and your family this Easter.
Project HORUS Launch 56 (AREG)
The AREG’s High-Altitude Ballooning sub-group, Project Horus, is planning their next launch for Sunday the 1st of May, with a planned launch time of 10 AM. This will be the 56th ‘full-size’ high-altitude balloon launch of Project Horus, though numerous small launches have also occurred in the interim. The AREG website suggests that the launch site will be decided closer towards the launch date, but will be from either the Auburn town oval, or from the Mt Barker High School. The payloads on this flight will be a ‘Horus Binary’ telemetry tracker, and a ‘Wenet’ imaging payload (Streaming content), which will transmit live pictures through the flight.
Telemetry for this flight will be available on 434.200 Mhz and will be transmitted using the HORUS binary 4FSK data mode. Imagery on this flight will be transmitted via the Wenet downlink system (443.500Mhz), which uses 115kbit/s Frequency-Shift-Keying to send HD snapshots. Reception of the Wenet imagery requires a Linux computer, a RTLSDR, and a 70cm antenna with some gain (a 5-element Yagi is usually enough).
Tracking these balloons is fun and setting up the tracker (using a radio or an RTLSDR with a Raspberry Pi) is pretty straightforward. Am working on putting together a series of articles that will guide setup and build of such a tracking setup for your QTH, car, etc.
For additional details please head over to the AREG website
The Amateur Radio Experimenters Group (AREG) is located in Adelaide, South Australia. The AREG was formed in July 1998. The members of the AREG come from all walks of life but we all share a common interest in Electronics and Amateur Radio.
Help launch our next payload into the stratosphere, We need you – As you all know we are looking to grow the HAB group here at EMDRC and are on the lookout for individuals who are able to assist with the following roles:
- Architects – RF engineers, electronics gurus who are able to review design, perform reviews and provide input, feedback
- Launch Manager : Launch Prep, Logistics, Checklists, etc.
- Payload Design & Integration
- Payload testing & Validation
- Chase coordinator
- Tracker – With tracking setup within their chase car
- Tracker – With tracking setup at their QTH
If any of the above interests you please reach out to me at hab@emdrc.com.au.
Build your own tracking setup : We have plans to conduct a hands-on session to help you work through the build of a tracking setup. Such a tracking setup can be used to track High Altitude Balloons (AREG, EMDRC, etc.) including Radio Sondes (launched by the Bureau of Meteorology). Please reach out to us at hab@emdrc.com.au to register interest. The focus for these sessions includes –
- Building your own chase car setup [RTLSDR with a Raspberry Pi or VHF/UHF rigi, ¼ Wave Ground plane, etc.]
- Building your tracking setup at home [RTLSDR with a Raspberry Pi or VHF/UHF rig, ¼ Wave Ground plane, etc.]
We are working on publishing a tentative timeline of HAB activities for the rest of 2022. Stay tuned
Here’s a bunch of interesting links for those who want to learn more about HAB.
- UK High Altitude Balloon Society
- Track & retrieve HAB’s (launched here in Melbourne)
- Engineering Recommendations & Design Decisions
EMDRC High Altitude Balloon Initiative : April 2022
G’day Team – Hope you’ve been well.
Through the HAB column we hope to bring you regular updates on the High Altitude Balloon Initiative here at EMDRC. As you all know we are looking to grow the HAB group here at EMDRC and are on the lookout for individuals who are able to assist with the following roles:
- Architects – RF engineers, electronics gurus who are able to review design, perform reviews and provide input, feedback
- Launch Manager : Launch Prep, Logistics, Checklists, etc.
- Payload Design & Integration
- Payload testing & Validation
- Chase coordinator
- Tracker – With tracking setup within their chase car
- Tracker – With tracking setup at their QTH
If any of the above interests you please reach out to me at hab@emdrc.com.au.
We are also going to be conducting a hands on session at the next months barbecue to help you work through the following –
- Building your own chase car setup [RTLSDR, Raspberry Pi, ¼ Wave Ground plane, etc.]
- Building your tracking setup at home [RTLSDR, Raspberry Pi, ¼ Wave Ground plane, etc.]
Please be on the lookout for further details. We are hoping to be able to launch in the coming months. Here’s a bunch of interesting links for those who want to learn more about HAB.
- UK High Altitude Balloon Society
- Track & retrieve HAB’s (launched here in Melbourne)
- Engineering Recommendations & Design Decisions
EMDRC High Altitude Balloon Launch Prep
The EMDRC (Eastern & Mountain District Radio Club – https://www.emdrc.com.au) High Altitude Balloon team last got together on the 18th of September 2022 at 2100 on discord to work through timelines and approach for the upcoming launch. The EMDRC High Altitude Balloon team have locked in the 6th of November 2022 for our next launch, with a backup launch scheduled for the 13th of November (weather, etc.).
The EMDRC (Eastern & Mountain District Radio Club – https://www.emdrc.com.au) High Altitude Balloon (HAB) have conducted their first High Altitude Balloon launch on the 4th of September, from Ararat, Victoria. For a detailed launch report please visit –
Over these last few weeks torrential rains have cause widespread flooding across Victoria which is a matter of concern and is being monitored closely by the High Altitude Balloon team. We are hopeful that the situation will improve in the coming weeks so that we can proceed with the launch. So, as always, we’ll keep monitoring the situation, get together as a group, review the data and make a call at the Go/No-Go meeting.
Key Dates – So here are the key dates for the upcoming EMDRC High Altitude Balloon Launch.
- 23rd of Oct 22 – HAB barbecue and payload build at EMDRC clubhouse (1100 – 1300 Hrs)
- 28th Oct 22 – Launch Prep session at 2100 Hrs (on Discord)
- 5th Nov – Launch Go/No-Go at 2100 Hrs (on Discord)
- 6th Nov – Launch from Centenary Park, Ararat at 1000 Hrs
Who’s Who in the Zoo – The EMDRC High Altitude Launch team includes includes :
- Rohan VK3TRO
- Mark VK3MD
- Mark VK3IRV
- Brad VK3BKQ
- John VK3PZ
- Mark VK5QI
- Trevor VK3TWC
- Trystan J
- Rory VK3ASY
- Chris VK3PLS
- Greg Boyles
- Andrew Lee
- Andrew VK3BQ
- John VK3WWW
We are always looking to take on capable individuals to support design, build, launch of the payload. Please drop us a note if you are interested and we’ll help you get started.
Payload design & Build – Here’s an update on the approach, design and build of the payload for the upcoming launch.
- The primary payload for the upcoming launch will include a re-programmed RS41 sonde running the HORUS binary.
- The primary payload will also include a Raspberry Pi Zero / LoRA module running the WENET software.
- As per plan, Trevor VK3TWC had ordered a new Raspberry Pi Zero board along with a Pi Camera from Core Electronics both of which arrived a few weeks ago.
- Both the Pi Zero board, along with the Pi Camera and the payload bag has been handed over to Greg Boyles. Trystan will be picking up the items from Greg, testing things out in preparation for the upcoming launch on the 6th of November.
- Trystan will be running a few tests based on the learning from the last launch to test out our hypothesis. Based on the outcome of the testing changes might need to be made to the structure of the payload box, outcomes yet to be confirmed.
- The kids at Coderdojo Altona North are building a Data Logger based on the Raspberry Pi Pico and a PiicoDev BME280 sensor from Core Electronics.
- Two teams of kids at CodeDojo Altona North are working feverishly on building their own Raspberry Pi Pico based Data logger.
- Two of these data logger modules are to be sent up with the High Altitude Balloon.
- This launch is funded as a science experiment through a grant from the Hobsons Bay City Council.
- The kids have tested out their code for the Raspberry Pi Pico and the PiicoDev BME280 on a breadboard. The code is designed to poll the PiicoDev BME280 for temperature, humidity, pressure data and log all of that information to a file every 10 seconds.
- Greg Boyles who also happens to be a volunteer at CoderDojo Altona North, has helped build two protoboards with the Pi Pico and the PiicoDev BME280 mounted on it.
- Trevor along with his group of volunteers at CoderDojo Altona North are supporting the kids with the build of the data logger payload. Expecting the board, software to be finalized by the 22nd of Oct 2022.
Bill Of Material – Here’s the Bill of Material that we agreed to invest in at the last session, procurement status for each of the items on the list.
- 1 x hwoyee 600 Balloon – Ordered from Random Engineering UK, items have landed last week.
- 1 x hwoyee 1000 Balloon – Ordered from from Random Engineering UK, items have landed last week.
- 1 x Parachute 24 inch spherachute – Ordered from from Random Engineering UK, items have landed last week.
- 1 x Parachute 42 inch spherachute – Ordered from from Random Engineering UK, items have landed last week.
- 1 x E Type Helium Gas Bottle – Chris VK3PLS has helped procure a gas bottle for the launch.
- Foam cutter x 1 – John VK3PZ has worked with the committee to purchase this item, it’s now stocked at the EMDRC club house.
- 1 x module LORA board – Mark VK5QI has sent through to Trystan (Thanks a ton Mark!!!!!)
- 1 x Pi zero + Pi camera x 1 (medium size cable with camera) – Items were ordered from Core Electronics, have landed and been handed over to Greg Boyles (Trystan to pickup).
- Energizer batteries x 2 (pack of 4) – Has been purchased.
- Sandisk high endurance SD card 32GB x 4 – Yet to be purchased.
- Scotch extreme strapping tape (officeworks) x 1 – Yet to be purchased.
- Poly Styrene (Clark rubber) sheet 1 inch x 1 – Yet to be purchased.
- Bare double sided general purpose tape x 1 (Bunnings) – Yet to be purchased.
Key launch variables include –
- Scientific balloon – Hwoyee 1000
- Parachute – 42 inch spherachute
- Gas – Pure helium gas
- Weight of payload – Assuming ~700 gm, to be confirmed [Previous flight >> 500 gm || 350gm for Styrofoam box with pi, batteries, camera + 95gm for reprogrammed RS 41 radio sonde + 55gm parachute]
- Ascent rate – 5.5 m/s
- Descent rate – 3.51 m/s
- Burst Altitude – ~30Km
- Payload & radios – Styrofoam box with the following :
- Raspberry Pi Zero with a camera
- Lora board connected to the Pi Zero W for purposes of streaming images (over Wenet)
- 1/4th Ground plane antenna
- Re-flashed Bureau of Meteorology Radiosonde (RS41) with the HORUS binary
- 2 x Data Logger Modules : Raspberry Pi Pico with PiicoDev BME280 sensors
- Launch date – 6th of November with 13th of November 2022 as backup
- Launch location – Centenary Park Oval, Ararat
- Launch time – 1000 Hrs AEST with recovery to be performed soon after
- Frequencies in use –
- Wenet (image transmission) frequency : 441.200 Mhz
- HORUS (RS 41) frequency : 434.200 Mhz
- Simplex for comms – 146.525 Mhz
- Frequencies for monitoring (NO TRANSMISSION ALLOWED)-
- YARA (Ararat Aerodrome) CTAF for monitoring prior to release of balloon – 126.7 Mhz
- YARA (Ararat Aerodrome) Melbourne FSS (Melbourne Center) for monitoring prior to release of balloon – 126.8 Mhz


Roles & Responsibilities – The team has shared responsibilities for many of the launch activities. Here’s a view of ownership of the various tasks –
- Rohan VK3TRO – Payload design & build + Part of the launch and recovery team
- Rory VK3ASY – Payload design & build + Part of the launch and recovery team
- Trystan J – Payload design & build + Part of the launch and recovery team
- Mark VK3IRV – Design & build of Yagi antenna and Raspberry Pi setup to track Wenet and Sonde payload + Part of the launch and recovery team
- Brad VK3BKQ – Design & build of Yagi antenna and Raspberry Pi setup ro track Wenet and Sonde payload+ Part of the launch and recovery team
- Greg Boyles – Design & build of the filling apparatus + Part of the launch and recovery team
- Chris VK3PLS – Design & build of the filling apparatus + Part of the launch and recovery team
- Andrew B – Part of the launch and recovery team
- Andrew Lee – Official EMDRC HAB Photographer + Part of the launch and recovery team
- Mark VK3MD – Part of the launch and recovery team
- John VK3PZ – Part of the launch and recovery team
- Jack B VK3WWW – Part of the launch and recovery team
- Andrew VK3BQ + VK3EEK + VK3DNS – Part of the launch and recovery team
- Mark VK5QI – Mentor & Guide
- Trevor VK3TWC – Strategy, logistics, communications, media, etc. + Part of the launch and recovery team
Come Join the Party – You are invited to join the EMDRC High Altitude Balloon group and help out with the launch prep activities. You are welcome to drive down, be part of the launch activities on the 6th of November 2022 at Ararat and then join us for the chase, payload recovery soon after. The launch site is at Ararat which is a ~2.5 hr drive from the heart of Melbourne and we intend to launch at the agreed time of 1000 Hrs, so plan out your day and set out early if you intend to be there for the launch. Details to be confirmed closer to the launch.
If you would rather stay home or rather grab a coffee and track the payload remotely then that’s great too. Here’s links to the software you need to track the High Altitude Balloon and payload we are launching.
- Project HORUS Chasemapper – Plot your position on a map relative to the balloon using a Raspberry Pi and GPS
- Project Horus horusdemodlib – Plot a reprogrammed radiosonde used as a payload for Amateur High Altitude Balloons
- Project HORUS Horusgui – Windows software to track a reprogrammed radiosonde used as a payload for Amateur High Altitude Balloons
- See images being broadcasted in real-time from the balloon – https://ssdv.habhub.org/
- Link to track the Horus payload in real time – Sondehub
Read more about High Altitude Ballooning and get started with your own High Altitude Balloon journey at https://hack2.live/high-altitude-ballooning/. Drop us a note at trevor at hack2 dot live if you have any questions, suggestions or comments.